
UGP-KD An unsupervised generalized prediction framework for robot machining quality under historical task knowledge distillation for new tasks
Published in June 01, 2025
Contribution
The contribution points of this paper can be summarized as follows:
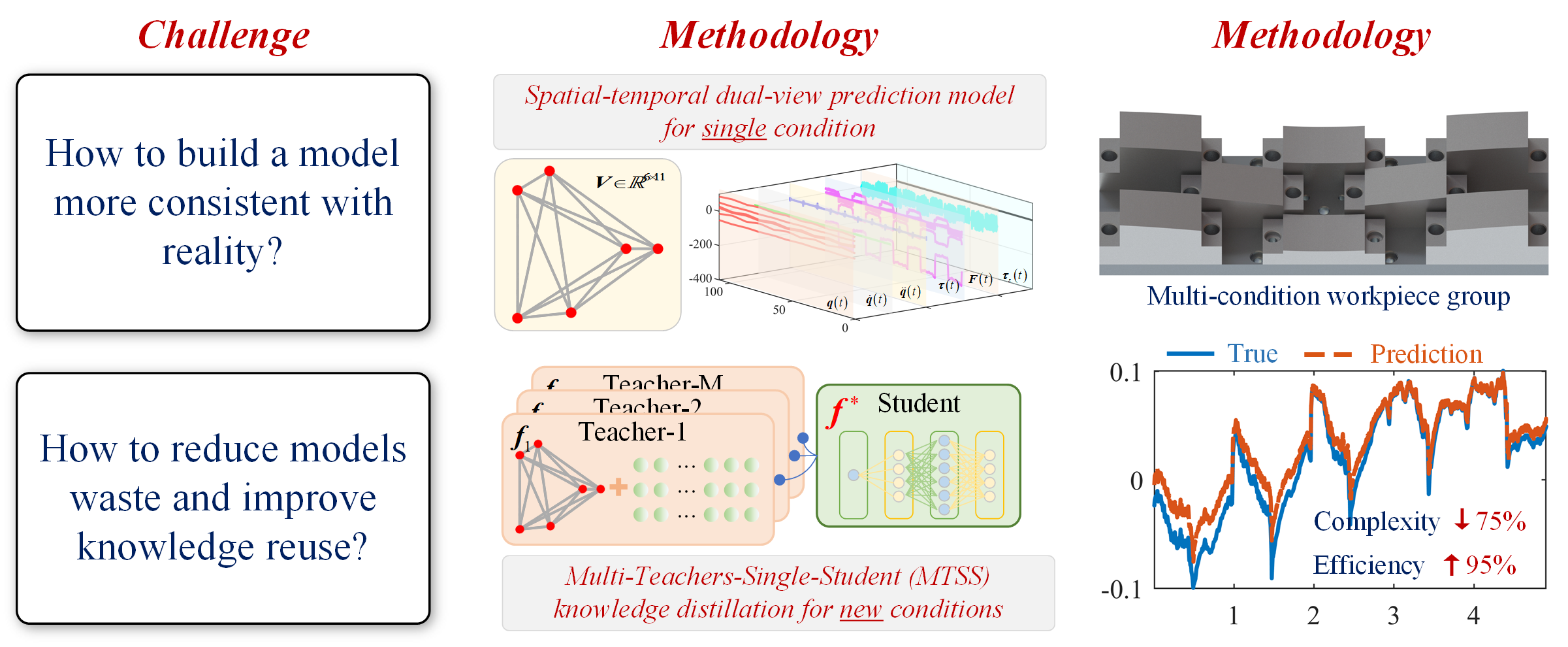
- Firstly, A fusion mapping machining error prediction model was proposed for a single condition from the dual perspectives of temporal and spatial fusion. An accurate prediction of the machining error under the influence of the spatial dependence and temporal fluctuation coupling factors of a robotic machining system was realized.
- Secondly, Multi-Teacher-Single-Student (MTSS) unsupervised generalized prediction framework for multiple working conditions is proposed. The reuse of the mapping knowledge of different working conditions and generalization to new working conditions was achieved by knowledge distillation for trained single-condition dual-view machining error prediction models under different working conditions.
Graphic Abstracts
The graphic abstract is shown below
Recommended citation: T. Zhang, F. Peng, Z. Yang, X. Tang, R. Yan, UGP-KD: An unsupervised generalized prediction framework for robot machining quality under historical task knowledge distillation for new tasks, Computers in Industry, 168 (2025) 104269, https://doi.org/10.1016/j.compind.2025.104269. https://doi.org/10.1016/j.compind.2025.104269